3.4. Optimization of a Path#
The Mechatronics Design Challenge will require your TurboPi Robot to perform a search-and-rescue mission while navigating through extremely dangerous materials that it must not touch!
Image Credit: financeinspired.com
There are many paths through the dangerous materials and you must decide, using the engineering design process, which path to take and then program your TurboPi Robot through the materials safely. In order to determine the best path, you will use trigonometry and science equations to optimize for the least amount of time to navigate through the path.
3.4.1. Step 1 - Determine the Forward Speed of your TurboPi Robot#
The speed of the robot can be determined using the basic speed equation:
Speed (ft/s) = Distance (ft) / Time (s)
Complete the following in your Engineering Notebook
Program your TurboPi Robot for varying times moving forward (at least five data points) and record in your Engineering Notebook using a table.
Create a graph of Distance (ft) vs Time (s) of the data you collected in your Engineering Notebook. Make it as large as an entire page.
Calculate the slope of the best-fit line, which will be the Forward Speed (ft/s) that you will use for further calculations.
3.4.2. Step 2 - Determine the Turning Speed of your TurboPi Robot#
In a similar fashion to your forward speed, you can calculate the turning speed of your robot:
Turning Speed (degrees/s) = Turn Angle (degrees) / Time (s)
Complete the following in your Engineering Notebook
Program your TurboPi Robot for varying times turning (at least five data points) and record in your Engineering Notebook using a table.
Create a graph of Turn angle (degrees) vs Time (s) of the data you collected in your Engineering Notebook. Make it as large as an entire page.
Calculate the slope of the best-fit line, which will be the Turning Speed (degrees/s) that you will use for further calculations.
Check to see if you robot turns at different speeds to the left versus the right. Make a note of this in your Engineering Noteebook. How can you account for this in future calculations?
3.4.3. Step 3 - Calculating the Time to Navigate through a Given Path#
Suppose you had a path given to you and you needed to calculate the total time to traverse the path.
Consider the path below. How would you determine the total time to took to go from start to finish?
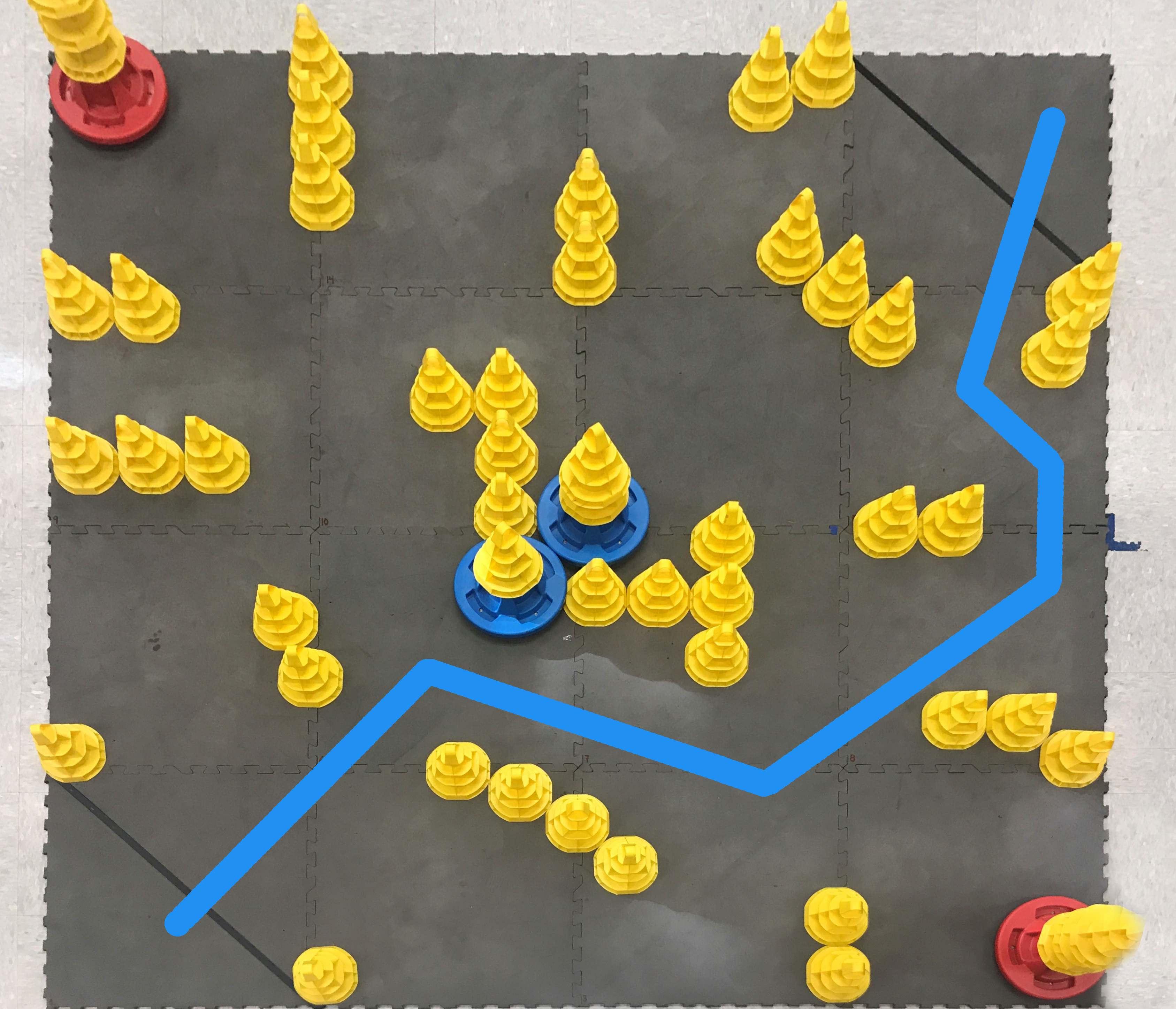
You will need to calculate (or measure directly) each forward distance and each turn angle, then using your Forward Speed and your Turning Speed, calculate the time it takes to traverse each segment of the path. Finally, add up all the times to determine the total time it takes to complete the path.
Download the following Excel file and follow along with your instructor as they review how to set it up. You will make one yourself using Excel for the Mechatronics Design Challenge.
3.4.4. Step 4 - Repeat the Process Multiple Times to Determine the Quickest Path#
Now that you have learned how to use Excel to automate the calculations, determine the Total Time for Path for at least three different paths. You will use the Total Time for Path as one of the criteria in your Decision Matrix.